KUNFENG
桁架机械手操作解析
在工业化生产运用中,桁架机械手可进行全自动自动控制系统的实际操作,可反复程序编写,多功能,多可玩度,运动健身可玩度,组成室内空间设计倾斜角关系,多用途操作机。可运输物件,操作过程常用工具,进行各种各样工作中。桁架结构式智能机器人的发生替代了手工制做的上下原材料,使全部生产过程更为安全性,避免 身体与加工中心直接接触,减少了职工的劳动生产率,减少了工作中成本费。
桁架机械手上下原材料制作工艺剖析:
工业设备运作;
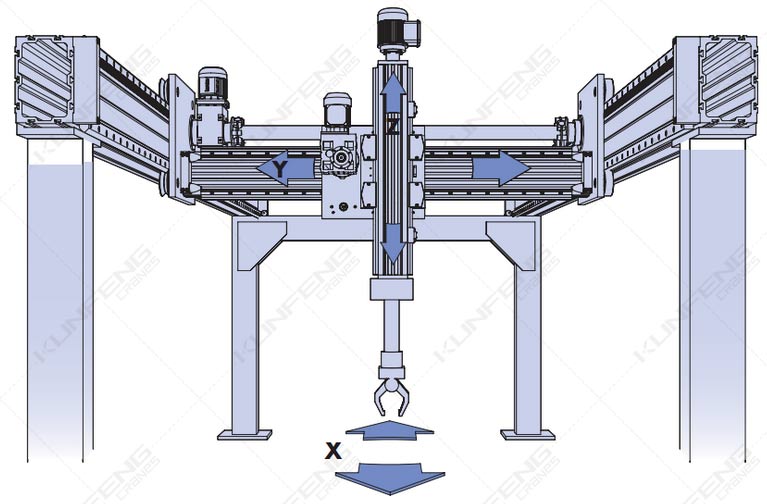
Z轴机械手臂返回选择点,逐渐完成姿态;
当必须上下原材料时,Z轴挪动到拖盘里拿取商品产品工件;
z轴升高,水准挪动到十字滑台上,减少到工作中台子上的专用工具工装夹具上,取下生产制造商品的产品工件,随后转动z轴承轴承端盖部的专用工具工装夹具,将零件加工工装夹具夹在操作台的专用工具工装夹具上,开展优秀料后入料的整个过程。
z轴挪动到拖盘上,将生产制造商品的产品工件放进拖盘的配对位置。
静弯弯曲刚度剖析:
静弯弯曲刚度是考量桁架机械手特性的重要指标。依据排架结构,截止阀沿竖直置放向底部挪动时,屈伸量大,形变量大。因而,对全部机械设备静弯弯曲刚度开展剖析,挑选这时机械手臂的部位,测算液压系统最下边各轴向的数据格式偏位:
X轴:0.210mm。
Y轴:0.190mm。
Z轴:0.010mm。
科学研究结果显示,全部机构 在X方向形变很大,弯曲应变较弱,它是因为齿轮泵加载时承重墙形变而致。滚动枕芯也是机械手臂静弯弯曲刚度的缺点,能够根据提高筋板或提高梁壁厚等防范措施来提升 机械手臂的静弯弯曲刚度。
实体模型剖析:
运作模式用以明确构造的固有频率和震动种类。其功效不仅是避免 各种各样机械零件和构造的共震,比如梁的水准弯折震动和梁的歪曲形变:
低承重墙弯曲应变对系统动态性特点伤害巨大。因为十字直线滑轨座和滑枕与承重墙一起震动扭曲,安裝在滑枕下端机械手臂的精度级别会遭受危害,造成 机械手臂在装卸搬运和运送全过程相对误差很大,进而严重危害商品产品工件在加工中心上的精准定位。此外,承重墙的弯折形变会马上严重危害固定不动在承重墙上的导轨的平面度和平面度,也会严重危害其精度级别。
相频特性剖析:
运作模式能够获得排架结构机械手臂的多种多样样子,但它只代表着机械手臂各一部分的相对性震动。假如充分考虑外力作用激励,能够确立每一个震动样子对全部机械设备的震动伤害,因而剖析排架结构机械手臂的相频特性能够清晰地见到机械手臂在荷载功效下的抗震等级特点:沿梁导轨运动健身构件的经常启停和液压系统的上下反复健身运动非常容易造成共震。因而,在全部机械手臂全自动自动控制系统的方案设计中,应尽量避免共震,以防止 机械手臂滑枕震动过大,造成 卸载掉时安裝精准定位不精确。
桁架结构式机械臂的优势:
多种多样可玩度运动健身,每一种可玩度运动健身中间的室内空间设计夹角为倾斜角。
自动化控制系统软件,可反复程序编写,全部运动健身均严格按照开展。
一般由全自动自动控制系统、推动系统、机械系统、操作过程常用工具等组成。
灵便多功能,因操作过程常用工具不一样,作用也不一样。
稳定性高,运作速度更快,高精度。
可用以极端自然环境和长期性工作中,有益于操作过程和维护保养。
































-
 昆峰重工(苏州)有限公司河南分公司是一家集生产、制造、销售为一体集成商厂家,致力于智能船舶生产线,非标自动化生产线、汽车生产线、智能门架、自动化焊接门架、plc伺服操控系统、智能工厂生产线等一站式服务。
昆峰重工(苏州)有限公司河南分公司是一家集生产、制造、销售为一体集成商厂家,致力于智能船舶生产线,非标自动化生产线、汽车生产线、智能门架、自动化焊接门架、plc伺服操控系统、智能工厂生产线等一站式服务。 -
最新文章
-
导航链接
-
联系我们
周一到周五:8:00-18:00
电话:+86-15366477186
邮箱:vip@kfqizhongji.com
Copyright © 2024 昆峰重工(苏州)有限公司河南分公司 豫ICP备2021028374号-2 公网安备:豫公网安备41010702003089号 XML地图